
/* AmbiSensor - Sensor Ambiental (simulación) - IoT (Internet of Things)
Julio César Sandria Reynoso - Mayo 2026
Este programa genera aleatoriamente datos ambientales de
Temperatura, Humedad, CO2 e Iluminación, y los envía a
un servidor en la nube para poder ver los datos en tiempo
real desde cualquier dispositivo
Hardware: Arduino UNO, Módulo WiFi Esp8266, Fuente de poder para protoboard,
protoboard, 2 resistencias de 1K, cables dupont.
*/
// Incluimos la librería WiFiEspAT que es más reciente que WiFiEsp
#include <WiFiEspAT.h>
// Si usamos Arduino Mega o Leonardo USAR_MEGA = true
// Si usamos Arduino Uno o Nano USAR_MEGA = false
// const bool USAR_MEGA = true; // true = Arduino Mega | false = Arduino Uno
// Configuración dinámica de puertos Serial según la placa
// usando directivas del precompilador
#if defined(ARDUINO_AVR_MEGA2560) || defined(__AVR_ATmega2560__)
// Si Arduino IDE detecta un Arduino Mega o Leonardo
// Conecta pin 18 (TX1) a pin RX del Esp, con divisor de voltaje a 3.3V
// Conecta pin 19 (RX1) a pin TX del Esp
#define EspSerial Serial1
#else
#include <SoftwareSerial.h>
// En Arduino Uno o Nano:
// Conecta pin 2 (RX) a pin TX del Esp
// Conecta pin 3 (TX) a pin RX del Esp, con divisor de voltaje a 3.3V
SoftwareSerial softSerial(2, 3);
#define EspSerial softSerial
#endif
// Credenciales Wi-Fi
const char* ssid = "nombre-red-wifi";
const char* password = "clave-red-wifi";
// Configuración del servidor ThingsBoard
const char* server = "thingsboard.cloud";
const int port = 80;
const char* token = "TOKEN";
// Variables de ambiente
float temp = 25; // En grados Celcius
float humedad = 62; // En porcentaje (%)
int co2 = 450; // En ppm (partes por millón)
int luz = 780; // En luxes o valor analógico (0-1023)
void setup() {
Serial.begin(9600);
Serial.println("Iniciando programa AmbiSensor - Sensor Ambiental...");
// Inicializar la comunicación serial con el módulo WiFi Esp8266
EspSerial.begin(9600); // Velocidades preferentes 115200 (Mega) o 9600 (Uno)
Serial.println("Inicializando modulo Wi-Fi...");
WiFi.init(&EspSerial);
if (WiFi.status() == WL_NO_MODULE) {
Serial.println("No se encontró el módulo Wi-Fi AT");
while (true); // Detener el programa si no hay módulo
}
// Conectar a la red Wi-Fi
Serial.print("Conectando a Wi-Fi: ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("\n¡Conectado a la red!");
}
void loop() {
// Asegurar que seguimos conectados antes de enviar datos
if (WiFi.status() == WL_CONNECTED) {
WiFiClient client;
// Abrir conexión TCP con el servidor
if (client.connect(server, port)) {
Serial.println("Conectado al servidor de ThingsBoard");
// *** AQUÍ SE DEBEN TOMAR LECTURAS DE LOS SENSORES REALES ***
// Para este ejemplo, vamos simulando lecturas aleatorias
temp += 2-random(5); // En grados Celcius
humedad += 2-random(5); // En porcentaje (%)
co2 += 7-random(15); // En ppm (partes por millón)
luz += 7-random(15); // En luxes o valor analógico (0-1023)
// 2. Preparar un JSON con múltiples variables
// El formato final será:
// {"temperature":24.5,"humidity":62.5,"co2":450,"light":780}
String sDatos = "{";
sDatos += "\"temperature\":" + String(temp) + ",";
sDatos += "\"humidity\":" + String(humedad) + ",";
sDatos += "\"co2\":" + String(co2) + ",";
sDatos += "\"light\":" + String(luz);
sDatos += "}";
// 3. Enviar la petición HTTP POST
client.print("POST /api/v1/");
client.print(token);
client.println("/telemetry HTTP/1.1");
// Encabezados
client.print("Host: ");
client.println(server);
client.println("Content-Type: application/json");
client.print("Content-Length: ");
client.println(sDatos.length());
client.println("Connection: close"); // Buena práctica para liberar memoria en el servidor
// Línea en blanco obligatoria
client.println();
// Cuerpo de los datos (sDatos)
client.print(sDatos);
client.println();
Serial.println("Datos enviados: " + sDatos);
// 4. Leer la respuesta del servidor (para asegurarnos
// del 200 OK, que significa datos recibidos correctamente)
unsigned long timeout = millis();
while (client.available() == 0) {
if (millis() - timeout > 5000) {
Serial.println(">>> ¡Timeout!");
client.stop();
return;
}
}
// Imprimir solo la primera línea (donde viene el código 200)
// para no saturar el monitor
if (client.available()) {
String status_line = client.readStringUntil('\r');
Serial.println("Status: " + status_line);
}
// Cerrar la conexión
client.stop();
} else {
Serial.println("Error: No se pudo conectar al servidor");
}
} else {
Serial.println("Wi-Fi desconectado. Intentando reconectar...");
}
// Esperar 10 segundos antes del siguiente envío
delay(10000);
}
 admin
admin
Instalación de ROS 2 y Webots en Ubuntu 22.04 LTS
Por Julio César Sandria Reynoso
30 de abril de 2026
En este artículo se describe la instalación de ROS 2 y Webots en Ubuntu 22.04 LTS en una computadora con arranque dual (dual boot) que ya tiene Windows 11 instalado. El Dual Boot es la opción más robusta para simulaciones pesadas porque permite que Ubuntu acceda al 100% del hardware (CPU, RAM y, sobre todo, la GPU) sin las capas de abstracción de una máquina virtual.
A continuación se muestra la hoja de ruta para instalar Ubuntu 22.04 LTS junto a Windows 11 de forma segura:
1. Preparación en Windows 11 (Crítico)
Antes de tocar cualquier partición, se debe preparar el terreno para evitar bloqueos del sistema.
- Desactivar «Inicio Rápido» (Fast Boot): Windows bloquea el disco duro al apagarse si esto está activo, impidiendo que Ubuntu escriba en él.
- Panel de Control > Hardware y sonido > Opciones de energía > Elegir el comportamiento de los botones de inicio.
- Desactivar BitLocker: Si Windows 11 tiene el cifrado de disco BitLocker activado, se debe desactivar o tener a mano la clave de recuperación de 48 dígitos. De lo contrario, no se podrá redimensionar la partición.
- Hacer espacio: Hacer clic derecho en el botón de Inicio > Administración de discos. Reducir el volumen de la unidad
C:para dejar al menos 60-100 GB de «Espacio no asignado» para Ubuntu, ROS 2 y simulaciones de Webots.
2. Crear el medio de instalación
- Descargar el archivo ISO oficial de Ubuntu 22.04.x LTS.
- Usar una herramienta como Rufus o BalenaEtcher para «quemar» el ISO en una memoria USB de al menos 8 GB.
3. Configuración de la BIOS/UEFI
Reiniciar la computadora y entrar al BIOS (usualmente presionando F2, F12, Del o Esc al arrancar).
- Secure Boot: En la mayoría de las computadoras desktop o laptops modernas, se puede dejarlo activado, pero si se tienen problemas para arrancar el USB, probar desactivarlo.
- SATA Mode: Asegurarse de que esté en AHCI (si está en RAID, Ubuntu podría no ver el disco duro o SSD). Cuidado: cambiar esto puede requerir configurar Windows para arrancar en AHCI primero.
4. El proceso de instalación de Ubuntu
Arrancar la computadora desde la USB (Boot Menu) y selecciona «Install Ubuntu». Siguiendo estos pasos clave:
- Red y Actualizaciones: Conectar a Wi-Fi y marca la casilla «Instalar programas de terceros para hardware de gráficos y Wi-Fi». Esto es vital para que los drivers de NVIDIA (si los hay) funcionen con Webots.
- Tipo de instalación: Aquí viene lo más importante. Seleccionar «Instalar Ubuntu junto a Windows Boot Manager».
- Si no aparece esta opción, elegir «Más opciones» para asignar manualmente el espacio no asignado creado en el paso 1.
- Particionado (si se elige Manual): Crear una partición
root(punto de montaje/) con el resto del espacio (mínimo 50 GB). Formato: ext4. - Finalizar: Seguir las instrucciones de ubicación y usuario.
5. Post-Instalación: El menú GRUB
Al reiniciar la computadora, se deberá ver una pantalla negra con letras blancas (el GRUB) que permite elegir entre Ubuntu y Windows Boot Manager.
6. Configuración para ROS 2 + Webots
Una vez en Ubuntu, lo primero que se debe hacer es optimizar el sistema para la simulación:
- Drivers de Video: Ir a «Software y actualizaciones» > «Más controladores» y asegurarse de usar el driver NVIDIA (Proprietary, tested). Sin esto, Webots irá muy lento.
7. Instalación de ROS 2 Humble
A continuación se detalla los comandos para que, una vez que se inicie sesión en Ubuntu 22.04, se deje listo para realizar simulaciones con ROS 2.
Abrir una terminal (Ctrl + Alt + T) y ejecutar estos bloques de comandos:
7.1. Configurar los Repositorios y las Claves
Primero, autorizar a Ubuntu para que confíe en los servidores de ROS 2.
$ sudo apt update
$ sudo apt install curl gnupg2 lsb-release -y
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null7.2. Instalar ROS 2 Humble (Desktop)
Instalar la versión completa que incluye Rviz2.
$ sudo apt update
$ sudo apt install ros-humble-desktop ros-dev-tools -y7.3. Instalar Webots y el Driver de ROS 2
Cyberbotics mantiene un repositorio propio, pero la forma más estable de integrarlo con ROS 2 es instalando el paquete oficial del puente:
$ sudo apt install ros-humble-webots-ros2 -yNota: Este comando instalará automáticamente una versión compatible de Webots si no se tiene.
7.4. Configurar el Entorno (Automático)
Para no tener que escribir source /opt/ros/humble/setup.bash cada vez que se abre una terminal, se añade a la configuración personal:
$ echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
$ source ~/.bashrc7.5. Verificación de Seguridad
Para confirmar que todo está en orden, intentar correr el ejemplo oficial de un robot móvil en un entorno simulado:
$ ros2 launch webots_ros2_universal_robot multirobot_launch.pyMatriz de 11×2 LEDs controlada con Arduino para un R2D2
Autor: Julio César Sandria Reynoso
Fecha: 9 de noviembre de 2024

En este artículo se presenta un proyecto de creación de una matriz de 11×2 LEDs que se controlan con Arduino para colocarlos en una ranura de un robot similar al R2D2 de las películas Star Wars.
Semanas atrás, uno de los alumnos del Instituto de Robótica de Xalapa (iRoX) llevó su robot R2D2 para hacerle algunas mejoras. Una de esas mejoras consiste en ponerle LEDs en algunas de las ranuras de la cabeza.
Una de esas ranuras es rectangular de 9 cm X 1.2 cm, donde se puede colocar una matriz de 11×2 LEDs por dentro de la cabeza para que se pueda ver su encendido desde el exterior.

La idea de poner varios LEDs fue para emular un tanto la forma en que trabaja el robot de las películas, encendiendo de diversas formas los LEDs de esa ranura.
Algunos de los alumnos participaron en el diseño de la sección rectangular para la colocación de los LEDs, inicialmente se consideró una tabla de MDF de 3mm cortada en láser para colocar allí los LEDs, pero se descartó porque con una placa fenólica perforada fue suficiente.
La disposición de los 22 LEDs, con resistencias, transistores y conexiones a Arduino se diseñó en Tinkercad. De hecho, en esta plataforma se hizo también la programación inicial y simulación de su funcionamiento, lo cual se muestra en el artículo Arreglo de 22 LEDS (11×2) con encendido aleatorio con Arduino en Tinkercad.

Después del diseño del circuito en Tinkercad, se procedió a soldar los componentes en la placa fenólica. El material usado es el siguiente:
- Placa fenólica perforada
- 22 LEDs de diferentes colores
- 11 resistencias de 220 Ohms
- 2 transistores 2N2222
- 2 resistencias de 1 KOhm
- Cable UTP
- Tira de pines macho 90° (14 conectores)

Una vez soldados todos los componentes como se ve en la imagen «Componentes soldados a la placa fenólica», se conectaron cables Dupont hembra-macho del circuito al Arduino UNO de la siguiente forma:
- Los primeros 11 cables de izquierda a derecha se conectan a los pines digitales 10 a 0 de Arduino respectivamente.
- El antepenúltimo cable (amarillo) se conecta al pin analógico A0.
- El penúltimo cable (naranja) se conecta al pin analógico A1.
- El último cable (rojo) se conecta a GND.
Una vez conectado todo, se cargó el siguiente programa C++ desde Arduino IDE al Arduino UNO.
// Programa C++ para Arduino
// Autor: Julio César Sandria Reynoso
// Fecha: Noviembre 2024
// Arreglo de LEDs de 11 columnas X 2 filas,
// enciende LEDs de forma aleatoria o con ciertos patrones
#define columnas 11
#define filas 2
int Columnas[] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
int Filas[] = {A0, A1};
int ledColumna[columnas];
int ledFila[columnas];
void setup() {
for (int col = 0; col < columnas; col++)
pinMode(Columnas[col], OUTPUT);
for (int fila = 0; fila < filas; fila++)
pinMode(Filas[fila], OUTPUT);
}
void loop() {
// Enciende un led iniciando en la primera fila de
// izquierda a derecha y terminando en la segunda
// fila a la izquierda
for(int t=100; t>=40; t=t-20)
ledPorFila(t,0);
// Enciende de 1 a 5 leds de forma aleatoria durante un tiempo
// de 100 + i*50 ms y apagándolos 0 ms
for(int i=1; i<6; i++)
ledsAleatorios(i,100+i*50,0);
// Enciende 6 leds de forma aleatoria durante 50 iteraciones
for(int i=0; i<50; i++)
ledsAleatorios(6,350,0);
}
void ledPorFila(int tEncendido, int tApagado) {
for(int i=columnas-1; i>=0; i--) {
digitalWrite(Filas[0], HIGH);
digitalWrite(Columnas[i], HIGH);
delay(tEncendido);
digitalWrite(Filas[0], LOW);
digitalWrite(Columnas[i], LOW);
delay(tApagado);
}
for(int i=0; i<columnas; i++) {
digitalWrite(Filas[1], HIGH);
digitalWrite(Columnas[i], HIGH);
delay(tEncendido);
digitalWrite(Filas[1], LOW);
digitalWrite(Columnas[i], LOW);
delay(tApagado);
}
}
void ledsAleatorios(int nLeds, int tEncendido, int tApagado) {
// Los arreglos ledFila[] y ledColumna[] tienen <columnas> elementos,
// de los cuales solo se usan <nLeds> elementos en esta función.
// Es posible que de forma aleatoria se repita un led a encender,
// pero es imperceptible o poco notorio durante la ejecución.
// Encendemos los nLeds indicados, durante <tEcendido> milisegundos
for(int i=0; i<nLeds; i++) {
ledFila[i] = random(0, filas);
ledColumna[i] = random(0, columnas);
digitalWrite(Columnas[ledColumna[i]], HIGH);
digitalWrite(Filas[ledFila[i]], HIGH);
}
delay(tEncendido);
// Apagamos todos los leds encendidos
for(int i=0; i<nLeds; i++) {
digitalWrite(Columnas[ledColumna[i]], LOW);
digitalWrite(Filas[ledFila[i]], LOW);
}
delay(tApagado);
}
Las siguientes fotografías son del circuito funcionando.




Al probar el programa se detectó que algunos LEDs no encendían, por lo que se hizo una revisión exhaustiva, encontrando algunos errores de soldadura, que se fueron resolviendo.
Con este tipo de proyectos, donde los alumnos practican los temas que se van viendo en el iRoX, los alumnos se sienten motivados a aprender aún mucho más.
Si te interesa aprender más sobre programación en C++, Arduino, robótica u otros lenguajes de programación, visita el sitio web del Instituto de Robótica de Xalapa (www.irox.mx) y contáctanos. Si estás en una región cercana a Xalapa, como Veracruz, Boca del Río, Córdoba, Martínez de la Torre, etc., puedes visitar las instalaciones del iRoX entre semana o un sábado y hablar con nuestros profesores sobre proyectos de robótica o tecnología.
Agradecemos a los alumnos que están participando en este proyecto: David, Germán, Fernando, Carlo y Max.
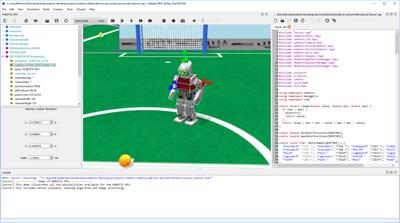
Simulador de robots móviles Webots
Webots es un simulador de robots móviles 3D de código abierto. Es una plataforma de simulación robótica diseñada para un uso profesional y ha sido ampliamente utilizada en la industria, la educación y la investigación.
Originalmente se desarrolló como una herramienta para investigar varios algoritmos de control en robótica móvil. Desde diciembre de 2018, Webots se liberó como un software de código abierto bajo la licencia Apache 2.0.
El sitio web de Webots es https://cyberbotics.com/ y la guía de uso está en https://cyberbotics.com/doc/guide/index.
Webots tiene una interfaz gráfica de usuario (GUI) con una ventana 3D para interactuar con la simulación 3D así como un editor de texto para editar el código fuente, entre otros elementos.
Aplicación de base de datos con Delphi CE
En esta entrada se ve cómo crear una aplicación de base de datos con Delphi 10.2.
Delphi CE: Primeros pasos con aplicaciones de base de datos.
Cursos
En el Instituto de Robótica de Xalapa se imparten cursos y talleres de robótica en verano y permanentes para niños, jóvenes y adultos, tales como:
- Cursos de Robótica para Niños y Jóvenes
- Cursos de Arduino
- Cursos de robótica con Arduino
- Cursos de robótica con Lego Mindstorms NXT y EV3
- Cursos de Raspberry Pi
El iRoX cuenta con amplia experiencia en la formación de niños y jóvenes, así como en la participación en eventos y concursos de robótica.
Cursos y talleres 2017
Más información en el sitio web del iRoX: www.iRoX.mx.
¿Cómo construir un dispositivo para monitoreo ambiental con Arduino y el Internet de la cosas?
 Por Ana Luisa Balderas García
Por Ana Luisa Balderas García
4to semestre de Bachillerato
Colegio de Bachilleres Simón Bolívar del Sureste
Participante en el Programa de Fomento al Interés por la Carrera Científica en Niños y Jóvenes con el Mtro. Julio Sandria en el Instituto de Ecología, A.C.
Día 1
 Aprendí los principios básicos del Arduino. Sus características, conexiones, su enlace a la computadora y el lenguaje de programación a utilizar.
Aprendí los principios básicos del Arduino. Sus características, conexiones, su enlace a la computadora y el lenguaje de programación a utilizar.
Realice ejercicios con un programa base (uno predeterminado). Este programa ordenaba a la tarjeta (Arduino) que encendiera un led y lo apagara con un tiempo de espera determinado entre cada orden. Ejercicio: El led enciende para dar una señal de SOS en código morse.
Día 2
 ¿Qué es el cambio climático?, y ¿Qué es el monitoreo ambiental?
¿Qué es el cambio climático?, y ¿Qué es el monitoreo ambiental?
- El cambio climático es la alteracion de proporcion y composición de gases de efecto invernadero que atrapan el calor de la atmósfera.
- El monitoreo ambiental discute desarrollos técnicos y el surgimiento de datos de monitoreo ambiental, principalmente en el diseño de sistemas de monitoreo y en el uso de la información recabada, analizando consecuencias del manejo de recursos naturales y riegos de la contaminación.
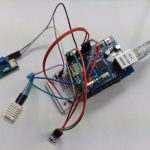
 Trabajamos con 3 sensores; el DHT22, que mide la humedad y temperatura, el BMP180, que mide la presión barométrica, la temperatura y la altura en metros sobre el nivel del mar; y el sensor de luz, con valores de luz del 0 al 1023, teniendo como referencia que el 0 es total iluminación y el 1023 para obscuridad.
Trabajamos con 3 sensores; el DHT22, que mide la humedad y temperatura, el BMP180, que mide la presión barométrica, la temperatura y la altura en metros sobre el nivel del mar; y el sensor de luz, con valores de luz del 0 al 1023, teniendo como referencia que el 0 es total iluminación y el 1023 para obscuridad.
Se tenía programas base para cada uno de los sensores, y se descargaron librerías para poder trabajarlos.
Ejercicio: Enlazar dos programas en uno, haciendo trabajar dos sensores al mismo tiempo. Los programas se entrelazaron., tomando las instrucciones del algoritmo base que el otro no tenía y eran fundamentales para su funcionamiento.
 Ejercicio: Acoplar el tercer sensor. Se utilizó un Protoboard para anexar las conexiones del tercer sensor y modificar el programa. Se conectó a internet para el registro de datos con una tarjeta de red, con entrada para cable Ethernet.
Ejercicio: Acoplar el tercer sensor. Se utilizó un Protoboard para anexar las conexiones del tercer sensor y modificar el programa. Se conectó a internet para el registro de datos con una tarjeta de red, con entrada para cable Ethernet.
Día 3
El Internet de las Cosas (Internet of Things, IoT), es una iniciativa global para la interconexión digital de objetos cotidianos mediante internet, la cual permite subir datos a un servidor para que se almacenen. El maestro Julio César Sandria Reynoso generó un programa en donde los datos obtenidos pasan a un servidor del INECOL y en otro servidor de forma gratuita en el IoT.
En conclusión, este prototipo nos sirve para monitorizar variables que pueden reflejar el cambio climático y estar disponibles en servidores gratuitos.
Robot Sanduino A01

El Robot Sanduino A01 es un paquete básico de robótica educativa basado en Arduino. Incluye: 1 chasis de acrílico con motores y ruedas, 1 tarjeta Arduino UNO, 1 puente H dual, 1 protoboard, 2 sensores de línea, 2 sensores de distancia infrarrojos (ó 2 sensores de contacto), 1 sensor de distancia ultrasónico, cables de conexión, tornillos y accesorios para su construcción. Requiere 8 baterías AA, no incluidas. Requiere desarmador plano y de cruz chicos, no incluidos.
Dónde comprar
El Robot Sanduino A01 lo puedes adquirir en RobotSA.
Guía de armado y programación
- Robot Sanduino A01 – Armado de chasis
- Robot Sanduino – Motores CD
- Robot Sanduino – Control con funciones
- Arduino Blink Monitor ejemplo
- Robot Sanduino – Sensores de luz
- Robot Sanduino – Busca negro
- Rotob Sanduino seguidor de línea
- Robot Sanduino – Sensor ultrasónico
- Encender LED en Arduino por Bluetooth desde Android
- Robot Sanduino controlado via Bluetooth con Android
- Separar caracteres en Arduino