
El Robot Sanduino A01 usa dos motores de Corriente Directa (CD), los cuales se pueden conectar como se muestra en la siguiente figura.
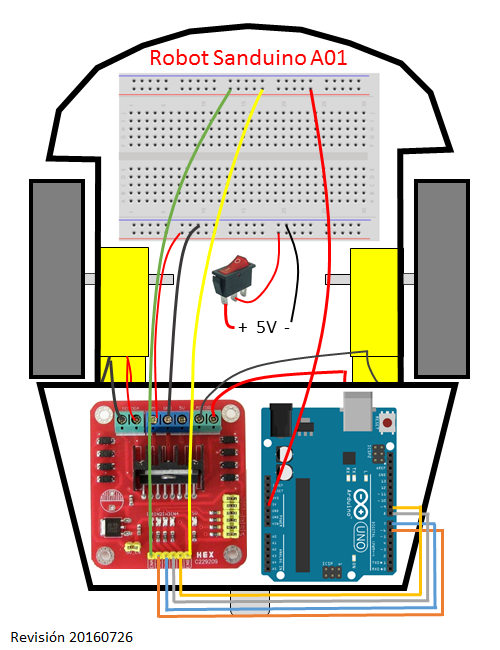
El puente H y la tarjeta Arduino UNO deben estar atornillados a la base superior del Robot Sanduino A01, usando un espaciador entre cada tarjeta de circuitos y la base superior, para evitar que las tarjetas se tuerzan al apretar los tornillos.
Las líneas de colores que unen conectores representan cables, que no necesariamente son de los colores mostrados.
Con el siguiente programa, puedes probar que todo el sistema esté apropiadamente conectado.
/* Programa: Sanduino_Motores.ino
Autor: Julio Sandria (Enero 2015)
Requiere: Robot Sanduino A01, con puente H
y Arduino UNO conectados.
Mueve el motor izquierdo con pines 6 y 7
Mueve el motor derecho con pines 8 y 9
*/
void setup() {
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
}
void loop() {
// Robot avanza 2 segundos
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
digitalWrite(8,HIGH);
digitalWrite(9,LOW);
delay(2000);
// Robot retrocede 2 segundos
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
digitalWrite(8,LOW);
digitalWrite(9,HIGH);
delay(2000);
}
Carga el programa en la tarjeta Arduino UNO del robot.
NOTA: Asegúrate de conectar una fuente de energía al interruptor y otra fuente de energía a Arduino UNO.
Al iniciar el programa, el robot debe avanzar dos segundos. Si en lugar de esto el robot retrocede, entonces hay que cambiar la polaridad de los cables conectados a los motores y al puente H.
Si al iniciar el programa, el robot gira hacia un lado dos segundos, hay que invertir la polaridad de los cables del motor conectado hacia el lado que gira.