El siguiente programa, es un ejemplo muy sencillo de programa en lenguaje C.
/* Programa: hola.c
Autor: Julio Sandria
Ejemplo Hola mundo!
*/
#include <stdio.h>
void main()
{
printf("Hola mundo!");
}
Para ejecutar el programa anterior, abre Code::Blocks, selecciona la opción File, después New, después Empty File. Esto creará un archivo vacío. Escribe o pega el código anterior en la sección de programación, como se ilustra en la imagen siguiente.
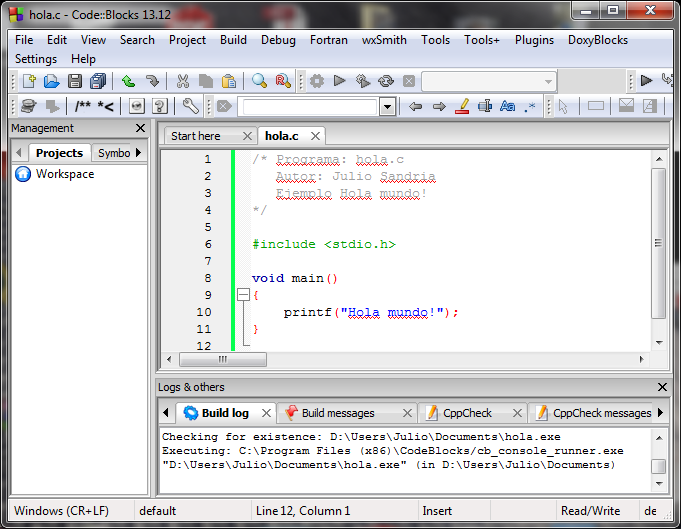
Guarda el programa con el nombre hola.c (File | Save File). Al hacer esto, Code::Blocks, reconoce el códico como un programa en C y lo muestra en colores.
Ejecuta el programa (Build | Run). Esto abrirá una terminal o ventana de símbolo de sistema (en Windows) como la siguiente.
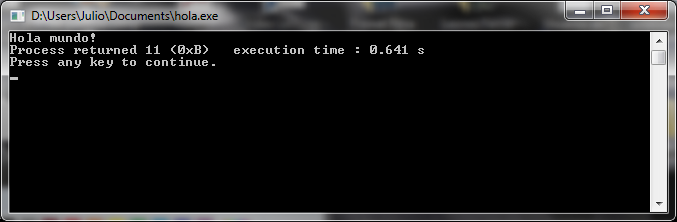
Observa que en la primera línea de la parte interior de la ventana está la frase Hola mundo!. Esto es lo que hace el programa, imprimir en la salida estándar (una terminal o ventana de comandos) dicho texto.
Las primeras cuatro líneas del programa son comentarios, que no tienen ningún efecto en el programa, son para que nosotros podamos poner algún texto. Los comentarios con muchas líneas empiezan con los caracteres /* y terminan con los caracteres */.
La línea 6 del programa contiene la instrucción include:
#include <stdio.h>
Esta línea le indica al compilador que en esa posición incluya una librería llamada stdio.h, la cual contiene la definición de instrucciones como printf que se usa a continuación.
Todo programa en C tiene una función main(), que es el punto inicial de ejecución de un programa.
La línea 8, void main() indica que allí inicia la función principal (main). Todo el contenido de la función está entre los símbolos { y }.
void main()
{
printf("Hola mundo!");
}
La función main está definida únicamente por una línea, que tiene la función printf(«Hola mundo!»), la cual lo único que hace es imprimir la frase Hola mundo!, en la salida estándar de la computadora, la cual por omisión una ventana donde se ejecuta el programa (terminal o símbolo de sistema).



 En esta presentación se proporciona al lector los conocimientos básicos para programar robots Lego Mindstorms NXT usando el lenguaje de programación Java. Se construye un robot móvil con los motores y sensores del paquete NXT y se usan algunos métodos básicos Java para el NXT.
En esta presentación se proporciona al lector los conocimientos básicos para programar robots Lego Mindstorms NXT usando el lenguaje de programación Java. Se construye un robot móvil con los motores y sensores del paquete NXT y se usan algunos métodos básicos Java para el NXT. Esta presentación es parte del curso Seguridad en Bases de Datos, tema 1: Conceptos de Bases de Datos, impartido por el autor a estudiantes de la Especialidad en Bases de Datos de la Universidad Autónoma de Veracruz Villa Rica.
Esta presentación es parte del curso Seguridad en Bases de Datos, tema 1: Conceptos de Bases de Datos, impartido por el autor a estudiantes de la Especialidad en Bases de Datos de la Universidad Autónoma de Veracruz Villa Rica.
{kind=link}