Kit de Robótica Educativa Robo-Ed JR1
Julio César Sandria Reynoso
Instituto de Robótica de Xalapa, A.C.
Agosto 2018
 Introducción
Introducción
La Robótica Educativa es un conjunto de actividades pedagógicas que apoyan y fortalecen áreas específicas del conocimiento en robótica, permitiendo así desarrollar habilidades y competencias en el alumno a través de procesos de concepción, creación, ensamble, programación y puesta en funcionamiento de robots.
En México, con la Reforma Educativa de 2012, se presenta la oportunidad de ofrecer formalmente Clubes de Robótica a nuestros niños y jóvenes. Por esto, en este artículo de Robótica Sandria, se presenta el kit de robótica Robo-Ed JR1 (Serie Principiantes) para niños y jóvenes que empiezan en el mundo de la robótica.
¿Qué es el robot Robo-Ed JR1?
Robo-Ed JR1 ( J-ROBO 1) es un kit coreano de Robótica Educativa recomendado para niños de educación Primaria Alta (4º, 5º y 6º grado) y Secundaria del Sistema Educativo Mexicano.
Es adecuado para las escuelas de educación Primaria y Secundaria que desean iniciar a sus alumnos en el mundo de la ciencia y tecnología mediante talleres o clubes de robótica, ya que incluye el material didáctico para que el maestro guíe a los alumnos en la construcción y programación de los diferentes modelos de robots que contiene el libro incluido.
Para este kit de robótica no se requiere que el maestro sea experto en robótica ni programación.
Los estudiantes que sueñan con ser científicos o ingenieros pueden mejorar su razonamiento, creatividad y aprendizaje al desarrollar proyectos finales de robótica en la escuela, participar en ferias de ciencia y tecnología o campeonatos regionales, nacionales y mundiales de robótica. La robótica también les permite complementar su educación al trabajar e investigar temas relacionados a la misma, como electricidad, electrónica, mecánica, programación, etc.
Kit básico Robo-Ed JR1
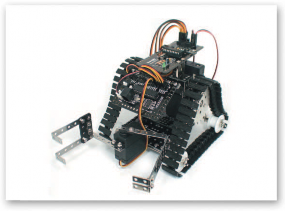
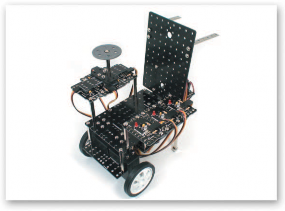
El Kit básico Robo-Ed JR1 es el primero de tres kits de robótica. El libro en papel o PDF tiene una serie de lecciones para la creación de robots con el que los estudiantes pueden aprender la teoría para la comprensión general de robots y mover robots mediante el uso de aparatos y máquinas simples y controlarlos con un controlador remoto.

Contenido educativo del kit básico Robo-Ed JR1
A continuación se muestran las lecciones o partes en las que está dividido el libro del kit básico Robo-Ed JR1.
 |
Introducción
Lista de partes, como ensamblar partes, precauciones, forma de usar el manual.
Lentes |
 |
Lección 1
¿Qué es un robot?
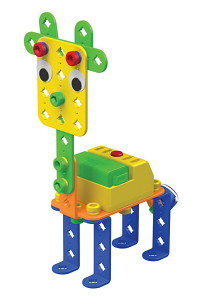
Caballo, robot |
 |
Lección 2
Principio de equilibrio.
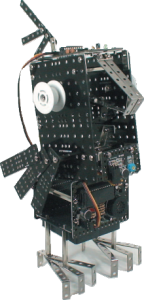
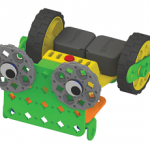
Tenazas, robot vigilante |
 |
Lección 3
Fuerzas de fricción.
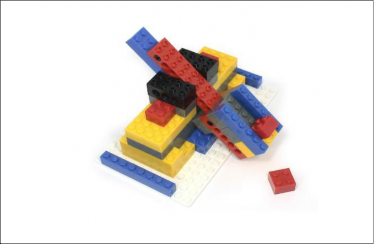
Aeroplano, motocicleta |
 |
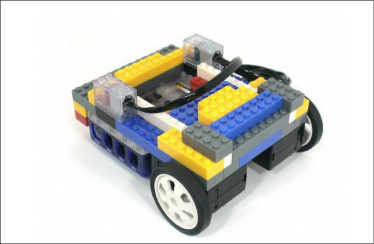
Lección 4
Control remoto.
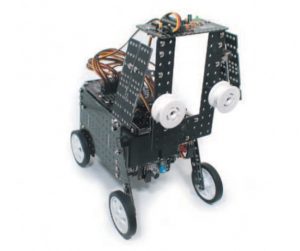
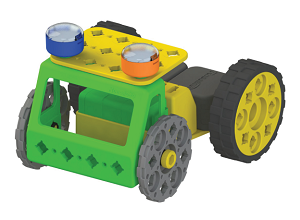
Coche cohete |
 |
Lección 5
Sensor infrarrojo.
Altura |
 |
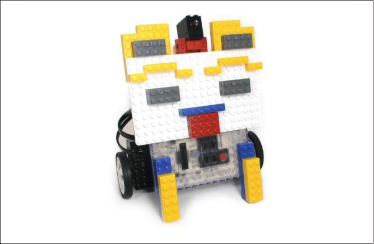
Lección 6
Evasor.
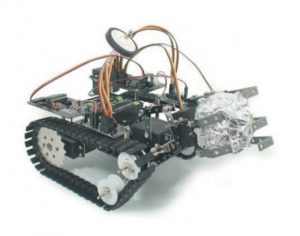
Robot de lucha
|
 |
Lección 7
Inercia.
Escorpión, libélula |
 |
Lección 8
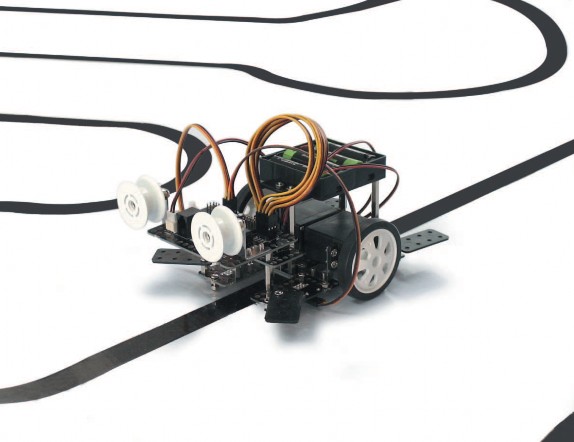
Seguidor de línea.
Tren |
 |
Lección 9
Centro de gravedad.
Robot de circo |
 |
Lección 10
Ley de acción y reacción.
Robot de batalla |
 |
Lección 11
Digital
Robot ratón |
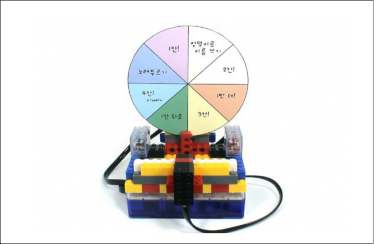
 |
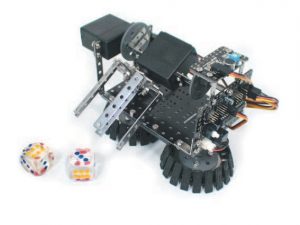
Lección 12
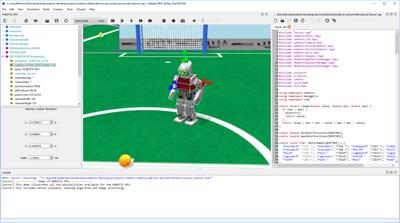
Futbol soccer
Robot futbolista |
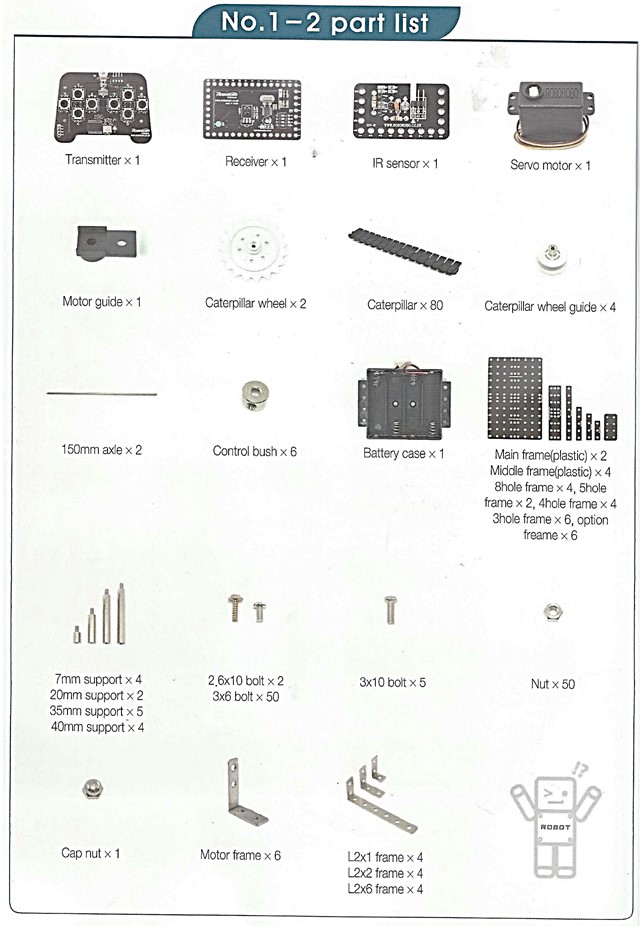
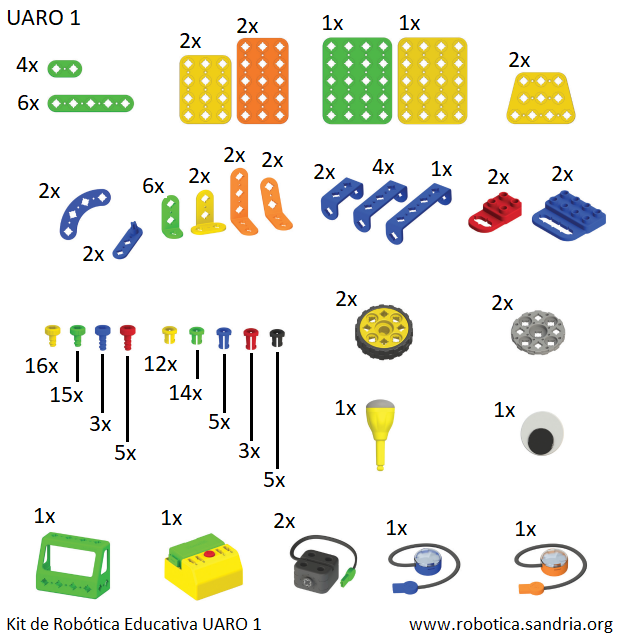
Lista de partes
El kit de robótica Robo-Ed JR1 tiene piezas de plástico, tuercas y tornillos que permiten el ensamblado de forma fácil con la ayuda del mínimo de herramienta (desarmador y llave) incluida en el mismo kit.
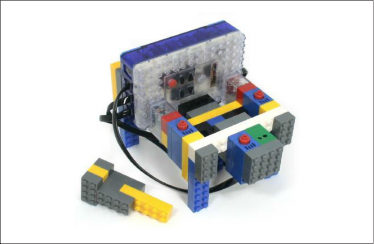
La electrónica está completamente implementada por el fabricante, por lo que solamente se requiere conectar sensores y motores a la tarjeta madre para su funcionamiento.
Las parte del kit son:
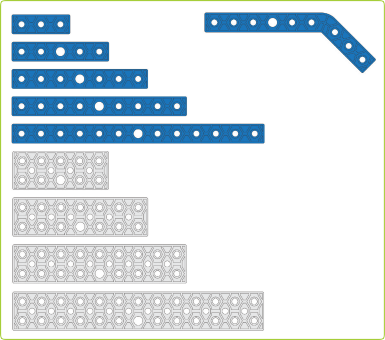
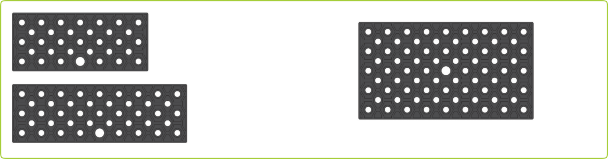
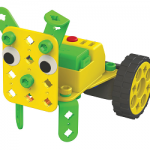
- Armazones
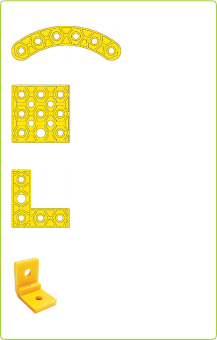
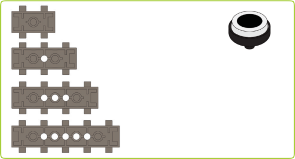
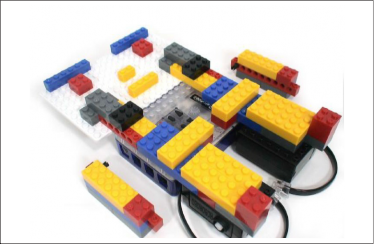
- Bloques
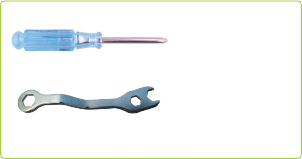
- Herramientas (desarmador y llave)
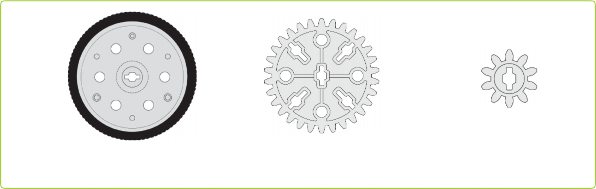
- Ruedas y engranes
- Ejes, separadores, tuercas y tornillos
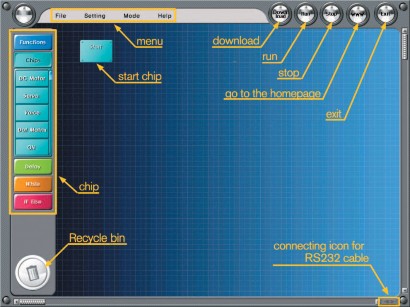
- Electrónica (tarjeta madre J-ROBO, motores CD, sensor IR, control remoto y porta pilas).
Armazones
Bloques
Herramientas
Ruedas y engranes
Ejes, separadores, tuercas y tornillos
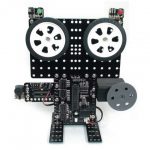
Electrónica

 ¿Dónde comprar Robo-Ed JR1?
¿Dónde comprar Robo-Ed JR1?
Robo-Ed JR1 lo puedes adquirir en RobotSA, distribuidor autorizado de Robótica Educativa de México, S.A. de C.V. (Robo-Ed), importador de J-ROBO en la república mexicana.
Enlaces relacionados

 Introducción
Introducción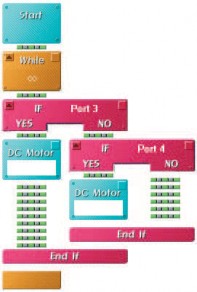 Para Universidades también es muy útil, ya que el Kit 1 complementado con las actualizaciones 2 a 6, puede contar con una gran diversidad de piezas que permiten armar modelos avanzados de robots.
Para Universidades también es muy útil, ya que el Kit 1 complementado con las actualizaciones 2 a 6, puede contar con una gran diversidad de piezas que permiten armar modelos avanzados de robots.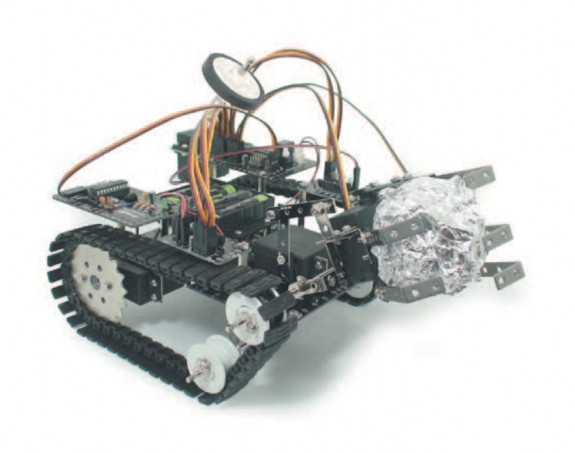







 La Robótica Educativa es un conjunto de actividades pedagógicas que apoyan y fortalecen áreas específicas del conocimiento en robótica, permitiendo así desarrollar habilidades y competencias en el alumno a través de procesos de concepción, creación, ensamble, programación y puesta en funcionamiento de robots.
La Robótica Educativa es un conjunto de actividades pedagógicas que apoyan y fortalecen áreas específicas del conocimiento en robótica, permitiendo así desarrollar habilidades y competencias en el alumno a través de procesos de concepción, creación, ensamble, programación y puesta en funcionamiento de robots.




















 Es adecuado para las escuelas de educación Secundaria y Preparatoria que desean iniciar a sus alumnos en el mundo de la ciencia y tecnología mediante talleres o clubes de robótica, ya que incluye el material didáctico para que el maestro guíe a los alumnos en la construcción y programación de los diferentes modelos de robots que contiene el libro incluido.
Es adecuado para las escuelas de educación Secundaria y Preparatoria que desean iniciar a sus alumnos en el mundo de la ciencia y tecnología mediante talleres o clubes de robótica, ya que incluye el material didáctico para que el maestro guíe a los alumnos en la construcción y programación de los diferentes modelos de robots que contiene el libro incluido.