Autor: Julio César Sandria Reynoso
Fecha: 9 de noviembre de 2024

En este artículo se presenta un proyecto de creación de una matriz de 11×2 LEDs que se controlan con Arduino para colocarlos en una ranura de un robot similar al R2D2 de las películas Star Wars.
Semanas atrás, uno de los alumnos del Instituto de Robótica de Xalapa (iRoX) llevó su robot R2D2 para hacerle algunas mejoras. Una de esas mejoras consiste en ponerle LEDs en algunas de las ranuras de la cabeza.
Una de esas ranuras es rectangular de 9 cm X 1.2 cm, donde se puede colocar una matriz de 11×2 LEDs por dentro de la cabeza para que se pueda ver su encendido desde el exterior.

La idea de poner varios LEDs fue para emular un tanto la forma en que trabaja el robot de las películas, encendiendo de diversas formas los LEDs de esa ranura.
Algunos de los alumnos participaron en el diseño de la sección rectangular para la colocación de los LEDs, inicialmente se consideró una tabla de MDF de 3mm cortada en láser para colocar allí los LEDs, pero se descartó porque con una placa fenólica perforada fue suficiente.
La disposición de los 22 LEDs, con resistencias, transistores y conexiones a Arduino se diseñó en Tinkercad. De hecho, en esta plataforma se hizo también la programación inicial y simulación de su funcionamiento, lo cual se muestra en el artículo Arreglo de 22 LEDS (11×2) con encendido aleatorio con Arduino en Tinkercad.

Después del diseño del circuito en Tinkercad, se procedió a soldar los componentes en la placa fenólica. El material usado es el siguiente:
- Placa fenólica perforada
- 22 LEDs de diferentes colores
- 11 resistencias de 220 Ohms
- 2 transistores 2N2222
- 2 resistencias de 1 KOhm
- Cable UTP
- Tira de pines macho 90° (14 conectores)

Una vez soldados todos los componentes como se ve en la imagen «Componentes soldados a la placa fenólica», se conectaron cables Dupont hembra-macho del circuito al Arduino UNO de la siguiente forma:
- Los primeros 11 cables de izquierda a derecha se conectan a los pines digitales 10 a 0 de Arduino respectivamente.
- El antepenúltimo cable (amarillo) se conecta al pin analógico A0.
- El penúltimo cable (naranja) se conecta al pin analógico A1.
- El último cable (rojo) se conecta a GND.
Una vez conectado todo, se cargó el siguiente programa C++ desde Arduino IDE al Arduino UNO.
// Programa C++ para Arduino
// Autor: Julio César Sandria Reynoso
// Fecha: Noviembre 2024
// Arreglo de LEDs de 11 columnas X 2 filas,
// enciende LEDs de forma aleatoria o con ciertos patrones
#define columnas 11
#define filas 2
int Columnas[] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
int Filas[] = {A0, A1};
int ledColumna[columnas];
int ledFila[columnas];
void setup() {
for (int col = 0; col < columnas; col++)
pinMode(Columnas[col], OUTPUT);
for (int fila = 0; fila < filas; fila++)
pinMode(Filas[fila], OUTPUT);
}
void loop() {
// Enciende un led iniciando en la primera fila de
// izquierda a derecha y terminando en la segunda
// fila a la izquierda
for(int t=100; t>=40; t=t-20)
ledPorFila(t,0);
// Enciende de 1 a 5 leds de forma aleatoria durante un tiempo
// de 100 + i*50 ms y apagándolos 0 ms
for(int i=1; i<6; i++)
ledsAleatorios(i,100+i*50,0);
// Enciende 6 leds de forma aleatoria durante 50 iteraciones
for(int i=0; i<50; i++)
ledsAleatorios(6,350,0);
}
void ledPorFila(int tEncendido, int tApagado) {
for(int i=columnas-1; i>=0; i--) {
digitalWrite(Filas[0], HIGH);
digitalWrite(Columnas[i], HIGH);
delay(tEncendido);
digitalWrite(Filas[0], LOW);
digitalWrite(Columnas[i], LOW);
delay(tApagado);
}
for(int i=0; i<columnas; i++) {
digitalWrite(Filas[1], HIGH);
digitalWrite(Columnas[i], HIGH);
delay(tEncendido);
digitalWrite(Filas[1], LOW);
digitalWrite(Columnas[i], LOW);
delay(tApagado);
}
}
void ledsAleatorios(int nLeds, int tEncendido, int tApagado) {
// Los arreglos ledFila[] y ledColumna[] tienen <columnas> elementos,
// de los cuales solo se usan <nLeds> elementos en esta función.
// Es posible que de forma aleatoria se repita un led a encender,
// pero es imperceptible o poco notorio durante la ejecución.
// Encendemos los nLeds indicados, durante <tEcendido> milisegundos
for(int i=0; i<nLeds; i++) {
ledFila[i] = random(0, filas);
ledColumna[i] = random(0, columnas);
digitalWrite(Columnas[ledColumna[i]], HIGH);
digitalWrite(Filas[ledFila[i]], HIGH);
}
delay(tEncendido);
// Apagamos todos los leds encendidos
for(int i=0; i<nLeds; i++) {
digitalWrite(Columnas[ledColumna[i]], LOW);
digitalWrite(Filas[ledFila[i]], LOW);
}
delay(tApagado);
}
Las siguientes fotografías son del circuito funcionando.




Al probar el programa se detectó que algunos LEDs no encendían, por lo que se hizo una revisión exhaustiva, encontrando algunos errores de soldadura, que se fueron resolviendo.
Con este tipo de proyectos, donde los alumnos practican los temas que se van viendo en el iRoX, los alumnos se sienten motivados a aprender aún mucho más.
Si te interesa aprender más sobre programación en C++, Arduino, robótica u otros lenguajes de programación, visita el sitio web del Instituto de Robótica de Xalapa (www.irox.mx) y contáctanos. Si estás en una región cercana a Xalapa, como Veracruz, Boca del Río, Córdoba, Martínez de la Torre, etc., puedes visitar las instalaciones del iRoX entre semana o un sábado y hablar con nuestros profesores sobre proyectos de robótica o tecnología.
Agradecemos a los alumnos que están participando en este proyecto: David, Germán, Fernando, Carlo y Max.
 Introducción
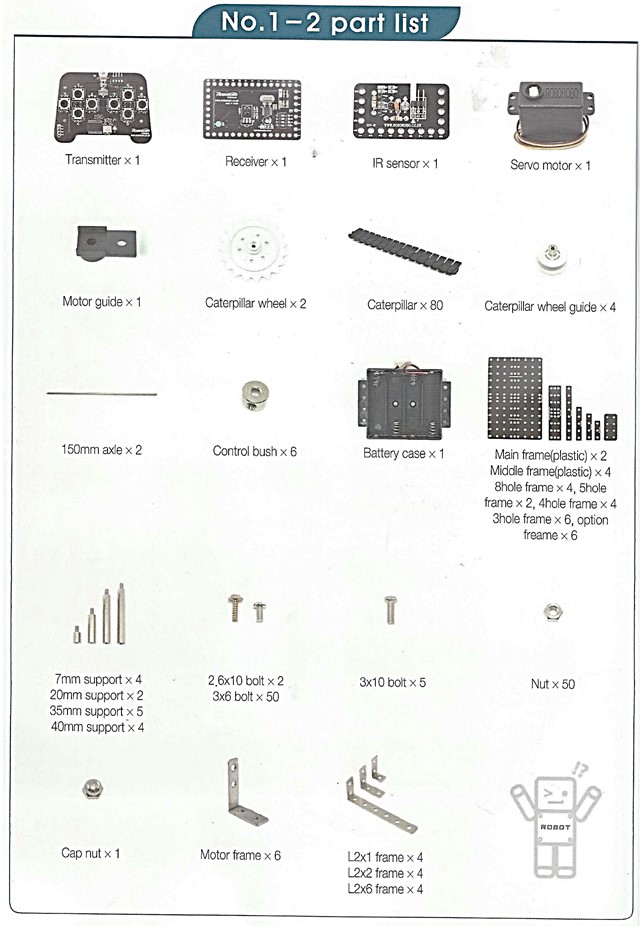
Introducción Para Universidades también es muy útil, ya que el Kit 1 complementado con las actualizaciones 2 a 6, puede contar con una gran diversidad de piezas que permiten armar modelos avanzados de robots.
Para Universidades también es muy útil, ya que el Kit 1 complementado con las actualizaciones 2 a 6, puede contar con una gran diversidad de piezas que permiten armar modelos avanzados de robots.







 La Robótica Educativa es un conjunto de actividades pedagógicas que apoyan y fortalecen áreas específicas del conocimiento en robótica, permitiendo así desarrollar habilidades y competencias en el alumno a través de procesos de concepción, creación, ensamble, programación y puesta en funcionamiento de robots.
La Robótica Educativa es un conjunto de actividades pedagógicas que apoyan y fortalecen áreas específicas del conocimiento en robótica, permitiendo así desarrollar habilidades y competencias en el alumno a través de procesos de concepción, creación, ensamble, programación y puesta en funcionamiento de robots.



















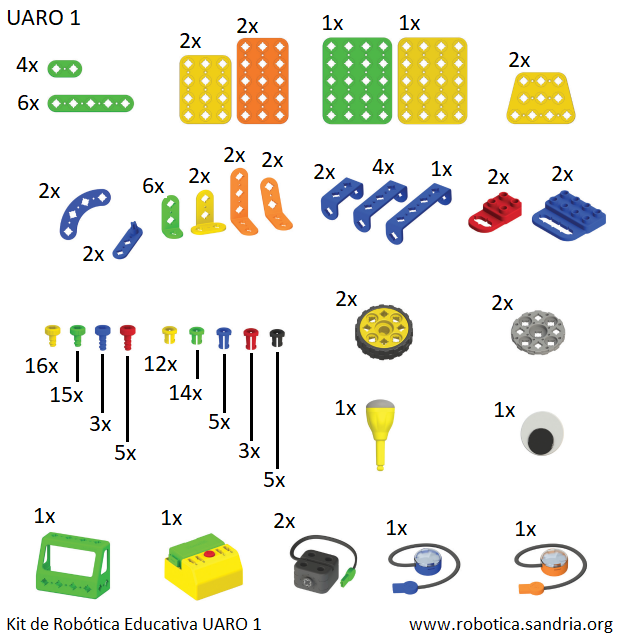

 Es adecuado para las escuelas de educación Secundaria y Preparatoria que desean iniciar a sus alumnos en el mundo de la ciencia y tecnología mediante talleres o clubes de robótica, ya que incluye el material didáctico para que el maestro guíe a los alumnos en la construcción y programación de los diferentes modelos de robots que contiene el libro incluido.
Es adecuado para las escuelas de educación Secundaria y Preparatoria que desean iniciar a sus alumnos en el mundo de la ciencia y tecnología mediante talleres o clubes de robótica, ya que incluye el material didáctico para que el maestro guíe a los alumnos en la construcción y programación de los diferentes modelos de robots que contiene el libro incluido.










 Introducción
Introducción