
¿Cómo controlar un LED con Arduino?
Arduino UNO y otros modelos de tarjetas Arduino, tienen incorporado un LED conectado al PIN 13, como se ilustra en la siguiente imagen, donde el LED está señalado en rojo.
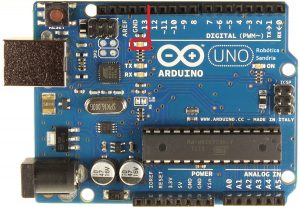
El programa siguiente hace que Arduino encienda y apague el LED conectado al PIN 13.
/* Programa: Blink.ino
Modificado por: Julio Sandria
Enciende un LED por dos segundos, y después
lo apaga un segundo, repite esto siempre hasta
que se apague Arduino
*/
void setup() {
// inicializa el pin digital 13 como una salida
// El pin 13 tiene un LED conectado en la
// mayoria de las tarjetas Arduino
pinMode(13,OUTPUT);
}
void loop() {
// loop = bucle, ciclo
// loop() se repite siempre hasta que se apague Arduino
digitalWrite(13,HIGH); // Enciende el LED
delay(2000); // Espera 2000 milisegundos (2 segundos)
digitalWrite(13,LOW); // Apaga el LED
delay(1000); // Espera 1 segundo
}
Este es solo un programa de ejemplo. Para controlar LEDs externos a Arduino consulta nuestra página: Arduino Blink Monitor Ejemplo.



 En esta presentación se proporciona al lector los conocimientos básicos para programar robots Lego Mindstorms NXT usando el lenguaje de programación Java. Se construye un robot móvil con los motores y sensores del paquete NXT y se usan algunos métodos básicos Java para el NXT.
En esta presentación se proporciona al lector los conocimientos básicos para programar robots Lego Mindstorms NXT usando el lenguaje de programación Java. Se construye un robot móvil con los motores y sensores del paquete NXT y se usan algunos métodos básicos Java para el NXT. Esta presentación es parte del curso Seguridad en Bases de Datos, tema 1: Conceptos de Bases de Datos, impartido por el autor a estudiantes de la Especialidad en Bases de Datos de la Universidad Autónoma de Veracruz Villa Rica.
Esta presentación es parte del curso Seguridad en Bases de Datos, tema 1: Conceptos de Bases de Datos, impartido por el autor a estudiantes de la Especialidad en Bases de Datos de la Universidad Autónoma de Veracruz Villa Rica.

{kind=link}